Neural Likelihood Estimation Quickstart#
[1]:
import os
import jax
import jax.numpy as jnp
import numpy as np
from jaxili.inference import NLE
print("Device used by jax:", jax.devices())
2025-03-12 20:28:41.278515: E external/local_xla/xla/stream_executor/cuda/cuda_fft.cc:477] Unable to register cuFFT factory: Attempting to register factory for plugin cuFFT when one has already been registered
WARNING: All log messages before absl::InitializeLog() is called are written to STDERR
E0000 00:00:1741807721.319378 24664 cuda_dnn.cc:8310] Unable to register cuDNN factory: Attempting to register factory for plugin cuDNN when one has already been registered
E0000 00:00:1741807721.326117 24664 cuda_blas.cc:1418] Unable to register cuBLAS factory: Attempting to register factory for plugin cuBLAS when one has already been registered
Device used by jax: [CudaDevice(id=0)]
In the previous example, we show how one can use Neural Posterior Estimation to estimate parameters using simulations and Normalizing Flows. Another strategy is to use the neural networks to learn the likelihood rather than the posterior. Let’s go through the same example using Neural Likelihood Estimation.
[2]:
n_dim = 3
def simulator(theta, rng_key):
batch_size = theta.shape[0]
return theta + jax.random.normal(rng_key, shape=(batch_size, n_dim))*0.1
[3]:
master_key = jax.random.PRNGKey(0)
num_samples = 50_000
theta_key, master_key = jax.random.split(master_key)
#Draw the parameters from the prior
theta = jax.random.uniform(theta_key, shape=(num_samples, n_dim), minval=jnp.array([-2., -2., -2.]), maxval=jnp.array([2., 2., 2.]))
sim_key, master_key = jax.random.split(master_key)
x = simulator(theta, sim_key)
[4]:
print("Parameters shape:", theta.shape)
print("Data shape:", x.shape)
Parameters shape: (50000, 3)
Data shape: (50000, 3)
Like in the previous example, we create an inference object. Only this time we use Neural Likelihood Estimation.
[5]:
inference = NLE()
inference = inference.append_simulations(np.array(theta), np.array(x))
[!] Inputs are valid.
[!] Appending 50000 simulations to the dataset.
[!] Dataset split into training, validation and test sets.
[!] Training set: 35000 simulations.
[!] Validation set: 9999 simulations.
[!] Test set: 5001 simulations.
Training#
Let’s train the model with the default setting.
[6]:
#Specify a checkpoint to save the weights of the neural network
CHECKPOINT_PATH = "."
#Turn it into an absolut path
CHECKPOINT_PATH = os.path.abspath(CHECKPOINT_PATH)
num_epochs = 500
metrics, density_estimator = inference.train(
checkpoint_path=CHECKPOINT_PATH,
num_epochs=num_epochs,
)
[!] Creating DataLoaders with batch_size 50.
[!] Building the neural network.
[!] Creating the Trainer module.
Could not tabulate model:
WARNING:absl:Configured `CheckpointManager` using deprecated legacy API. Please follow the instructions at https://orbax.readthedocs.io/en/latest/api_refactor.html to migrate.
[!] Training the density estimator.
Epochs: Val loss -2.597/ Best val loss -2.615: 5%|▌ | 25/500 [01:07<21:13, 2.68s/it]
Neural network training stopped after 26 epochs.
Early stopping with best validation metric: -2.6152846813201904
Best model saved at epoch 5
Early stopping parameters: min_delta=0.001, patience=20
[!] Training loss: -2.5910401344299316
[!] Validation loss: -2.6152846813201904
[!] Test loss: -2.603489398956299
Building the posterior and evaluating#
[7]:
import numpyro.distributions as dist
posterior = inference.build_posterior(
prior_distr=dist.Uniform(low=jnp.array([-2., -2., -2.]), high=jnp.array([2., 2., 2.]))
)
Using MCMC method: nuts_numpyro
MCMC kwargs: {}
[!] Posterior $p(\theta| x)$ built. The class MCMCPosterior is used to sample and evaluate the log probability.\n The sampling is performed using MCMC methods.
This time, the posterior is an MCMCPosterior. Indeed, we learned the likelihood so an extra sampling step is required to get the posterior. MCMCPosterior implements the sampling step using Markov Chain Monte Carlo (MCMC) algorithm. Hopefully, the likelihood is differentiable so we can used gradient-based sampling algorithmes such as HMC or NUTS (See this paper for a review).
[8]:
#Let's first create an observation
obs_key, master_key = jax.random.split(master_key)
fiducial = jnp.array([[0.5, 0.5, 0.5]])
obs = simulator(fiducial, obs_key)
#and then sample from the posterior
num_samples = 10_000
sample_key, master_key = jax.random.split(master_key)
samples = posterior.sample(
x=obs, num_samples=num_samples, key=sample_key
)
[[0.59638596 0.47953892 0.5699892 ]]
sample: 100%|██████████| 10500/10500 [00:32<00:00, 325.78it/s, 3 steps of size 8.61e-01. acc. prob=0.89]
The NeuralPosterior provides an abstract class to embedd the different posterior one can encounter when performing Implicit Likelihood Inference. Hence, the code to sample from the posterior is similar in NPE and NLE.
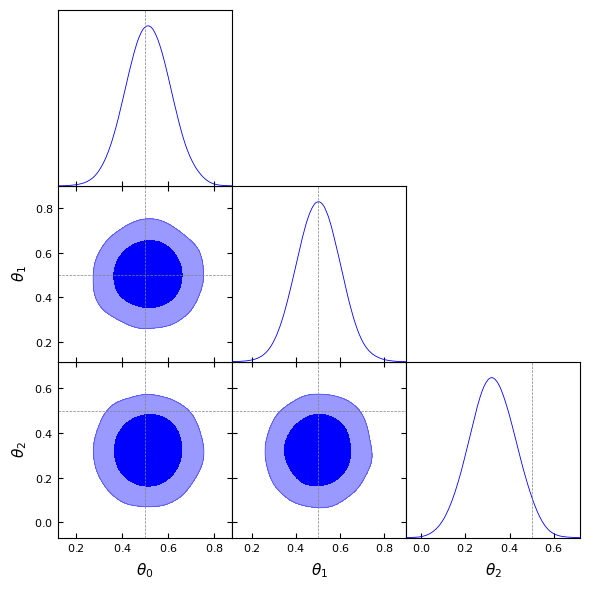
Visualisation of the learned posterior#
[9]:
#We will use getdist to visualise the results
import matplotlib.pyplot as plt
from getdist import plots, MCSamples
%matplotlib inline
[10]:
labels = [rf'\theta_{i}' for i in range(n_dim)]
samples_gd = MCSamples(samples=samples, names=labels, labels=labels)
g = plots.get_subplot_plotter()
g.settings.figure_legend_frame = False
g.settings.alpha_filled_add = 0.4
g.triangle_plot([samples_gd], filled=True,
line_args=[
{'color': 'blue'}
],
contour_colors=['blue'],
markers={
label: val for label, val in zip(labels, fiducial[0])
})
plt.show()
Removed no burn in
Comparison with reference samples#
This case is very simple so we can build a numpyro model to get reference samples of the posterior using HMC.
[11]:
import numpyro
prior_dist = dist.Uniform(low=jnp.array([-2., -2., -2.]), high=jnp.array([2., 2., 2.]))
def model(data):
theta = numpyro.sample("theta", prior_dist)
z = numpyro.deterministic("z", theta)
likelihood_distr = dist.Normal(loc=z, scale=0.1)
likelihood = likelihood_distr.log_prob(data)
numpyro.factor("log_likelihood", likelihood)
[12]:
from numpyro.infer import MCMC, NUTS
nuts_kernel = NUTS(model, adapt_step_size=True)
mcmc = MCMC(nuts_kernel, num_warmup=500, num_samples=10_000)
mcmc.run(jax.random.PRNGKey(42), data=obs)
reference_samples = mcmc.get_samples()["theta"]
sample: 100%|██████████| 10500/10500 [00:32<00:00, 325.15it/s, 3 steps of size 9.53e-01. acc. prob=0.89]
[13]:
labels = [rf'\theta_{i}' for i in range(n_dim)]
samples_gd = MCSamples(samples=samples, names=labels, labels=labels)
reference_samples_gd = MCSamples(samples=reference_samples, names=labels, labels=labels)
g = plots.get_subplot_plotter()
g.settings.figure_legend_frame = False
g.settings.alpha_filled_add = 0.4
g.triangle_plot([samples_gd, reference_samples_gd], filled=[True, False],
line_args=[
{'color': 'blue'},
{'color': 'black'}
],
legend_labels=['NLE', 'Reference samples'],
contour_colors=['blue', 'black'],
markers={
label: val for label, val in zip(labels, fiducial[0])
})
plt.show()
Removed no burn in
Removed no burn in
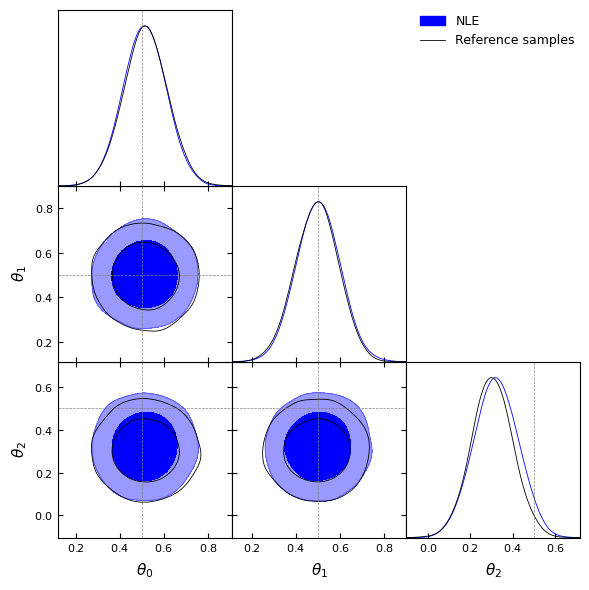
We see here that our posterior samples are really close to the reference obtained using the true likelihood and MCMC sampling.
Let’s also lay the stres on the fact the inference is also amortized. No training is required when using a different data vector!
Next steps#
In the following example, we will show how NPE and NLE perform on a more complex target posterior.