Training a Conditional MAF#
With JaxILI, it is possible to train a normalizing flow by hand without using the NPE or NLE interface. This can be useful to have a better control of the training loop.
This notebook shows how one can train a normalizing flow without using the API provided by JaxILI.
[1]:
import os
import jax
import jax.numpy as jnp
import jax_dataloader as jdl
import numpy as numpy
from jaxili.utils import create_data_loader #To create data loaders
from jaxili.train import TrainerModule #To perform the training
from jaxili.model import ConditionalMAF #The model used to learn the target distribution
from jaxili.loss import loss_nll_npe #Losses to train NFs with different configurations are provided
print("Device used by jax:", jax.devices())
2025-04-01 13:45:46.229508: E external/local_xla/xla/stream_executor/cuda/cuda_fft.cc:477] Unable to register cuFFT factory: Attempting to register factory for plugin cuFFT when one has already been registered
WARNING: All log messages before absl::InitializeLog() is called are written to STDERR
E0000 00:00:1743507946.255476 27494 cuda_dnn.cc:8310] Unable to register cuDNN factory: Attempting to register factory for plugin cuDNN when one has already been registered
E0000 00:00:1743507946.264976 27494 cuda_blas.cc:1418] Unable to register cuBLAS factory: Attempting to register factory for plugin cuBLAS when one has already been registered
Device used by jax: [CudaDevice(id=0)]
[2]:
#Let's use the same simulator than previously
n_dim = 3
def simulator(theta, rng_key):
batch_size = theta.shape[0]
return theta + jax.random.normal(rng_key, shape=(batch_size, n_dim))*0.1
[3]:
master_key = jax.random.PRNGKey(0)
num_samples = 10_000
theta_key, master_key = jax.random.split(master_key)
#Draw the parameters from the prior
theta = jax.random.uniform(theta_key, shape=(num_samples, n_dim), minval=jnp.array([-2., -2., -2.]), maxval=jnp.array([2., 2., 2.]))
sim_key, master_key = jax.random.split(master_key)
x = simulator(theta, sim_key)
print("Parameters shape:", theta.shape)
print("Data shape:", x.shape)
Parameters shape: (10000, 3)
Data shape: (10000, 3)
Let’s first create train, validation and test sets.
[4]:
train_set = jdl.ArrayDataset(theta[:7000], x[:7000])
val_set = jdl.ArrayDataset(theta[7000:9000], x[7000:9000])
test_set = jdl.ArrayDataset(theta[:9000], x[:9000])
We can then get dataloaders.
[5]:
train_loader, val_loader, test_loader = create_data_loader(
train_set, val_set, test_set,
train = [True, False, False],
batch_size=128
)
We then have to specify all the hyperparameters for the training.
[6]:
#Specify a checkpoint to save the weights of the neural network
CHECKPOINT_PATH = "."
#Turn it into an absolut path
CHECKPOINT_PATH = os.path.abspath(CHECKPOINT_PATH)
loss_fn = loss_nll_npe
model_hparams_maf = {
'n_in': n_dim,
'n_cond': n_dim,
'n_layers': 5,
'layers': [50, 50],
'activation': jax.nn.relu,
'use_reverse': True,
'seed' : 42
}
optimizer_hparams = { #hyperparameters of the optimizer for training
'lr': 5e-4,
'optimizer_name': 'adam'
}
logger_params = {
'base_log_dir': CHECKPOINT_PATH
}
check_val_every_epoch = 1
debug = False
nde_class= "NPE"
We then create a TrainerModule object that will perform the training. This module is created automatically when using the classes NPE or NLE.
[7]:
trainer_maf_npe = TrainerModule(
model_class=ConditionalMAF,
model_hparams=model_hparams_maf,
optimizer_hparams=optimizer_hparams,
loss_fn=loss_fn,
exmp_input=next(iter(train_loader)),
logger_params=logger_params,
debug=debug,
check_val_every_epoch=check_val_every_epoch,
nde_class=nde_class
)
#Train the Neural Density Estimator
metrics_maf_npe = trainer_maf_npe.train_model(
train_loader, val_loader, test_loader=test_loader, num_epochs=500, patience=20
)
Could not tabulate model:
Epochs: Val loss -2.660/ Best val loss -2.687: 19%|█▉ | 97/500 [00:32<02:16, 2.95it/s]
WARNING:absl:`StandardCheckpointHandler` expects a target tree to be provided for restore. Not doing so is generally UNSAFE unless you know the present topology to be the same one as the checkpoint was saved under.
Neural network training stopped after 98 epochs.
Early stopping with best validation metric: -2.687150239944458
Best model saved at epoch 85
Early stopping parameters: min_delta=0.001, patience=20
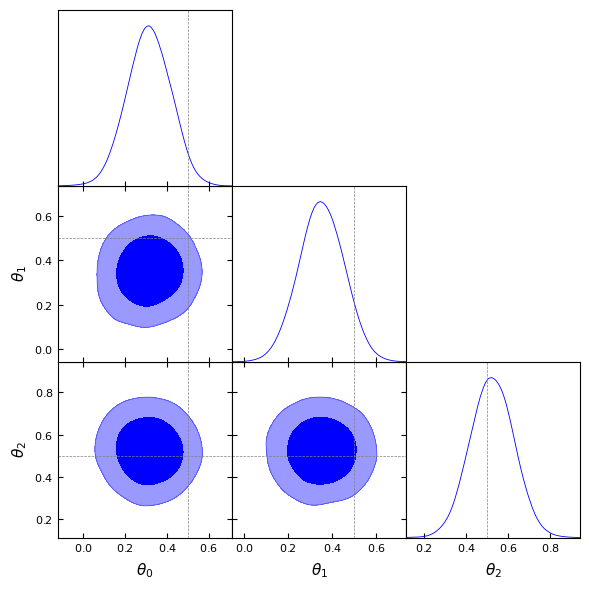
The trained model can then be used to sample from or compute the log-probability of the learned distribution.
[9]:
model_maf_npe = trainer_maf_npe.bind_model()
#Let's first create an observation
obs_key, master_key = jax.random.split(master_key)
fiducial = jnp.array([[0.5, 0.5, 0.5]])
obs = simulator(fiducial, obs_key)
sample_key, master_key = jax.random.split(master_key)
samples_maf_npe = model_maf_npe.sample(
obs, num_samples=10000, key=sample_key
)
[10]:
#We will use getdist to visualise the results
import matplotlib.pyplot as plt
from getdist import plots, MCSamples
%matplotlib inline
[11]:
labels = [rf'\theta_{i}' for i in range(n_dim)]
samples_gd = MCSamples(samples=samples_maf_npe, names=labels, labels=labels)
g = plots.get_subplot_plotter()
g.settings.figure_legend_frame = False
g.settings.alpha_filled_add = 0.4
g.triangle_plot([samples_gd], filled=True,
line_args=[
{'color': 'blue'}
],
contour_colors=['blue'],
markers={
label: val for label, val in zip(labels, fiducial[0])
})
plt.show()
Removed no burn in
Reloading a trained network#
After training, it can be useful to reload a model with the trained weights to save an unnecessary step of training. This is allowed by the class TrainerModule.
[12]:
trainer_maf_npe = TrainerModule.load_from_checkpoints(
model_class=ConditionalMAF,
checkpoint=os.path.abspath(CHECKPOINT_PATH)+"/ConditionalMAF/version_0/",
exmp_input=next(iter(train_loader))
)
WARNING:absl:Item "default" was found in the checkpoint, but could not be restored. Please provide a `CheckpointHandlerRegistry`, or call `restore` with an appropriate `CheckpointArgs` subclass.
WARNING:absl:Item "default" was found in the checkpoint, but could not be restored. Please provide a `CheckpointHandlerRegistry`, or call `restore` with an appropriate `CheckpointArgs` subclass.
WARNING:absl:`StandardCheckpointHandler` expects a target tree to be provided for restore. Not doing so is generally UNSAFE unless you know the present topology to be the same one as the checkpoint was saved under.
Could not tabulate model:
[14]:
model_maf_npe_ckpt = trainer_maf_npe.bind_model()
samples_maf_npe_ckpt = model_maf_npe_ckpt.sample(
obs, num_samples=10000, key=sample_key
)
[18]:
import numpy.testing as npt
npt.assert_array_equal(samples_maf_npe, samples_maf_npe_ckpt)
[17]:
labels = [rf'\theta_{i}' for i in range(n_dim)]
samples_gd = MCSamples(samples=samples_maf_npe_ckpt, names=labels, labels=labels)
g = plots.get_subplot_plotter()
g.settings.figure_legend_frame = False
g.settings.alpha_filled_add = 0.4
g.triangle_plot([samples_gd], filled=True,
line_args=[
{'color': 'blue'}
],
contour_colors=['blue'],
markers={
label: val for label, val in zip(labels, fiducial[0])
})
plt.show()
Removed no burn in

We recover the same posterior as the same observation has been used with the same seed and that the weight of the network have been recovered correctly.